Starofus
你好呀,我是Sans
【Sim2real】02 自定义ROS_controller实现反馈控制
2022-12-23
自定义ROS_controller实现反馈控制
代码:https://github.com/mrzhuzhe/Gurren
1. 概述
之前做了ROS moveit和Gazebo的demo,可以通过moveit生成末端执行器的到目标位置joint pose 或 cartesian pose的移动轨迹
Moveit 虽然可以考虑 (1)环境中的障碍物 (2)机器人本体 作路径规划,但是发现 moveit 的最小单元是轨迹点
也就是说: moveit 无法自定义轨迹之间两点的行为
因此:
- 1. 首先轨迹点应该是一个 catesian space(三维坐标系四元数姿态-用于几何变幻) 的描述 而非 joint space 描述(关节旋转位置描述-用于机器人)
注: 机器人关节电机的位置 -> joint space -> cartesian space 位置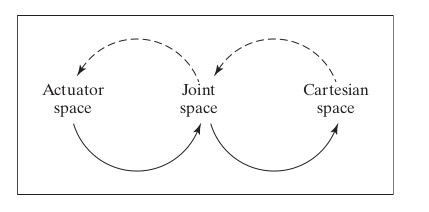
- 2. 根据机器人学导论《introduction to robotics》 - craig 轨迹点之间的运动应该是用forward/inverse kinematic dynamic 来求解,是非常核心的部分
- 3. 如果要自定义机器人实时的行为就得自定义ros_control,需要调用ros control loop 的钩子 start/update/shutup 等
- 4. ros control 才能对外部的信号(ros topic)做实时响应(Feedback)的逻辑
ur5的控制频率是125hz ur5e 1000hz
所以:决定尝试自定义ros controller 做一个最小实现的baseline
2. 演示
- 1. 注册ros control
- 2. 位置控制 Joint to cartesian 和 cartesian to joint
- 3. 速度控制
- 4. 实现一个简单业务逻辑
3. 相关工作
参考书:《 Introduction to robotics 》 - craig 中文名:《机器人学导论》
3.1 背景知识:
- 0. joint space 和 cartesian space
这俩个都是机器人状态的表示,其中cartesian指机器人末端的位置pose和朝向orientation
joint space 指机器人关节扭动的角度
一般我们会希望表示为机器人末端以一个速度移动,或者移动多少距离,cartesian space 描述更符合人的直觉
- 1. Eigen https://eigen.tuxfamily.org/
Cpp 矩阵计算库, 用来创建dense或者稀疏矩阵,做各种矩阵相乘,小矩阵求解,求伪逆等
- 2. 运动学/逆运动学
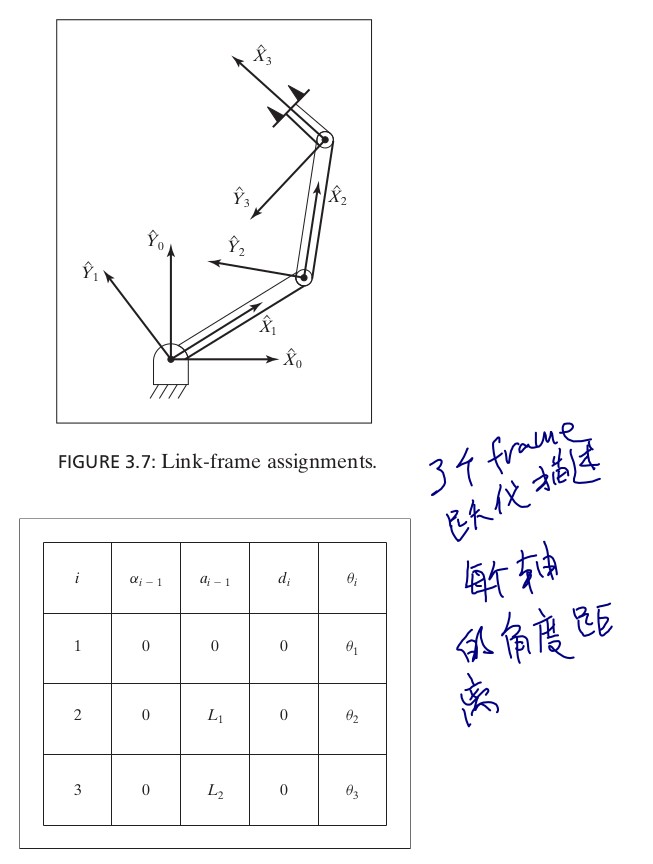
总的来说:就是如果已知机器人的 a/aplha/d: 关节位置/关节长度/关节偏置 就能根据机器人的安装位置逐关节的求解下一个关节的位置,也就是可以知道末端的位置,如上图二维的例子
逆运动学:如果已知机器人“当前”和”目标“两个pose:可以是joint pose 也可以是cartesian pose,可以求这两个pose之间如果通过扭动机器人的关节来运动到目标位置
此处可以参见《机器人学导论》第二章第三章
- 3. URDF
机器人的模型定义:
包含:
关节位置/长度/偏置 信息来计算运动学
关节重量,pid增益等
关节的转动限制条件,极限速度,极限角度等
- 4. 实时反馈控制 和 Control loop
Control loop 是 ros control 中约定的一个机器人控制的“生命周期钩子”
例如:ur5 的频率是125hz,每0.01毫秒调用此函数钩子
机器人可以在这个函数里获取到机器人当前的关节状态:速度位置等
在钩子里也可以把外部的信息,如末端力sensor的信息wrench通过ros topic传进来
所以如果要实时响应外部信号 就得在control loop 中写业务逻辑
- 5. ros 整体架构 和 gazebo 搭建仿真环境相关
这块可以看上一篇博客 ROS moveit和Gazebo的demo
3.2 整体架构:
[TODO] 此处需要完善,补充图
- 1. firmware
revolute joint: 伺服电机和减速机 - 2. ros controller joint cmmand interface ( joint state )
ros 提供的硬件管理和命令“协议”的实现 - 3. kdl getHandles
根据预先设置的机器人urdf初始化机器人joint space 和 cartesian space 转换关系
并注册对机器人关节硬件的控制权 - 4. kdl forward/inverse solver
在control loop 中调用求解器得到末端执行器运动,所需每个关节转动角度的方案,产生姿态变幻的运动 - 5. Business logic
自定义的逻辑,例如力控,导纳,阻抗控制等
3.3 参考的代码库:
- 1. ros_control
https://github.com/ros-controls/ros_control
ros 控制器协议的核心概念 - 2. ros_controllers
https://github.com/ros-controls/ros_controllers
基于ros control 自定义的Joint space转换控制器 ,说实话这个库面向对象封装的非常的让人迷惑,如果你要做的cartesian控制器不用看这个库 - 3. FCI franka_ros 和 libfranka
https://github.com/frankaemika/franka_ros
franka 自己实现的一系列控制器,需要注意的是franka 支持effortjointcontroller,就是关节扭矩控制,但是ur是不支持关节扭矩控制的 - 4. ur compliant control
https://github.com/MingshanHe/Compliant-Control-and-Application
特别鸣谢我的实现大部分都基于这个库,按自己理解做了一些必要的简化 - 5. kdl_parser
https://github.com/ros/kdl_parser
用来解析urdf获得机器人运动学参数a/alpha/d等,很多库都依赖于这个 - 6. orocos kdl
https://github.com/orocos/orocos_kinematics_dynamics
运动学求解器 这个库极其重要,很多逆运动学的求解都依赖于它,但是文档确非常糟糕,我是慢慢看它的代码才了解了一点点 - 7. FZI cartesian controller
https://github.com/fzi-forschungszentrum-informatik/cartesian_controllers
FZI 的开发者改进的运动学求解器,相当于自己实现了kdl的部分功能 - 8. moveit
https://github.com/ros-planning/moveit
其中求解逆运动学的部分基于orocos kdl但是也做了一些自己的修改
4. 逐步实现
- rqt
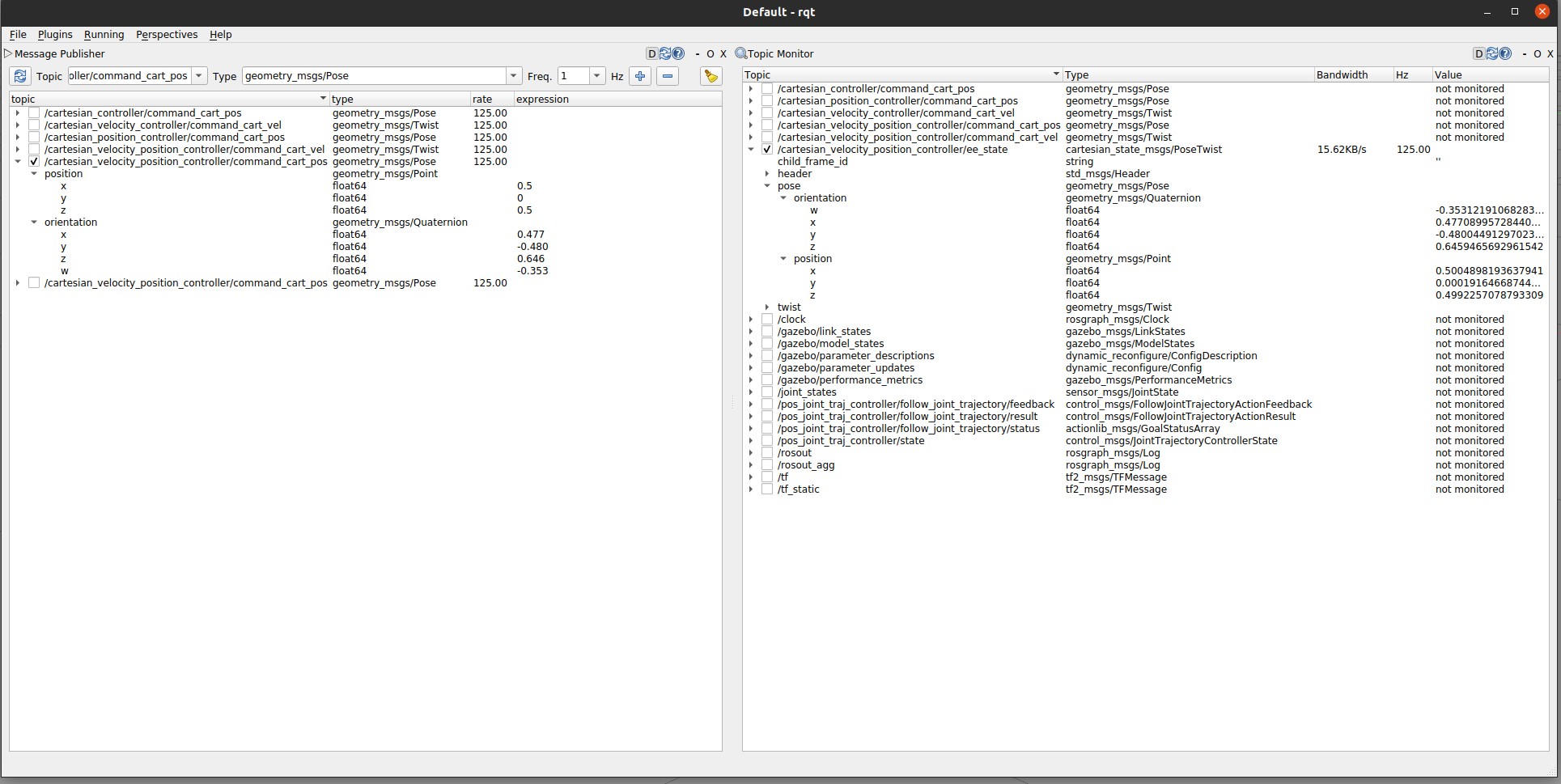
rqt可以方便的调试:可以publish和和查看topic
注意上图打勾的两个地方,左侧是publish topic 右侧是查看topic
- 注册控制器plugin// only test control hook Code: /my_controller/test_controller
roslaunch ur_gazebo ur5e_bringup.launch controllers:=test_controller
这块主要参考了ros_control本身的totoial
- 位置/和速度求解// cartesian position Code: /my_controller/cartesian_controller
roslaunch ur_gazebo ur5e_bringup.launch controllers:=cartesian_controller
这块需要用到下面这些kenimatic chain 速度/位置求解器// KDL definition: /my_controller/cartesian_controller/include/cartesian_controller/kdl_base.h这块kdl官方文档实在是年久失修,我一直找不到一个简单实现,
KDL::ChainFkSolverVel;
KDL::ChainFkSolverPos;
KDL::ChainIkSolverVel;
KDL::ChainIkSolverPos;
直到被人推荐了https://github.com/MingshanHe/Compliant-Control-and-Application
参照他调用kdl的例子结合kdl文档和代码才勉强把kdl用起来
- 速度求解// caertesian velocity controller Code: /my_controller/cartesian_velocity_controller
roslaunch ur_gazebo ur5e_bringup.launch controllers:=cartesian_velocity_controller
和位置一样速度也可以被分解为Jacobian,这是最符合人类直观感觉的一种控制方式
但是这个模式由于关节的速度限制,奇点更多
- 响应外部topic做自己的业务逻辑// run to a position with static cartesian velocity Code: /my_controller/cartesian_velocity_position_controller
roslaunch ur_gazebo ur5e_bringup.launch controllers:=cartesian_velocity_position_controller
力控/阻抗控制/实时机器学习控制等
5. 讨论
遇到的问题
- 全局蓝图不清,知识点杂乱
- [TODO]
6. 后续工作
伺服电机
- 算法误差
- 伺服电机误差
- 自定义硬件方案
重写KDL
KDL的替代方案
- FZI cartesian controller
- IKfast
- trackIK