Starofus
你好呀,我是Sans
open3d实践
2021-03-28
open3d中的一些实践,主要是将真实世界中环境通过intel realsense扫描重建成3d网格的相关内容
概述
- open3d官网:http://www.open3d.org/- 实践代码:https://github.com/mrzhuzhe/yunru/blob/main/realsense/
最近实践了open3d 中的基础功能和3d环境重建相关功能,可以扫描场景重建成3d图像,其中主要的 reconstruction代码基本上复制于open3d官网的对应例子,除了numpy存在一个在新版本mac电脑M1下的不兼容的问题(重装兼容的版本即可),基本上按照官网一步步复现就没有问题。
1. 所用设备 intel realsense D415 最好安置在云台上,相机抖动会对结果造成极大的影响
2. 依赖 open3d opencv (realsense设备所需的pyrealsense2其实并不没有用到)
3. 【注意】:anaconda自带的 np 在 m1 下运行 np.dot np.inv 会报错 \tIntel MKL ERROR: Parameter 8 was incorrect on entry to DGEMM 如果需要此错误,卸载np用pip或者conda重装即可
4. 我这边补充了一些上下游所需的工具,例如摄像头录像,预览视频,预览帧,裁剪点云等小工具用于调试 在 https://github.com/mrzhuzhe/yunru/tree/main/realsense/manual文件夹下
基本概念
1. 点云:一般声纳或激光传感器可以扫描到三维物体的深度,这些深度信息会被离散化 记录成3d空间中的坐标点,这些点的集合就是点云2. 深度帧和颜色帧:传感器不仅会扫描深度(深度帧)还会产生彩色照片(颜色帧),用相机内置的软件进行帧对齐后会生成一个“pair”配对
3. 姿态合并 和 姿态轨迹:一般情况下扫描会持续好几秒,在扫描过程中会缓缓的转动摄像头获取更广角的信息,这个过程中相邻帧会依据“重叠区域”来合并,合并时,会计算点云之间相对的旋转角度,连续很多角度产生的轨迹,就是“姿态轨迹“
4. 环境重建: 如果要重建一个很大的场景,就需要连续采集很多帧的点云,计算他们之间的姿态轨迹来合并这些点云,当然合并点云时姿态轨迹的计算可能会不太准确,会产生积累的误差,如何应对这种误差,是最大的挑战。
整体结构
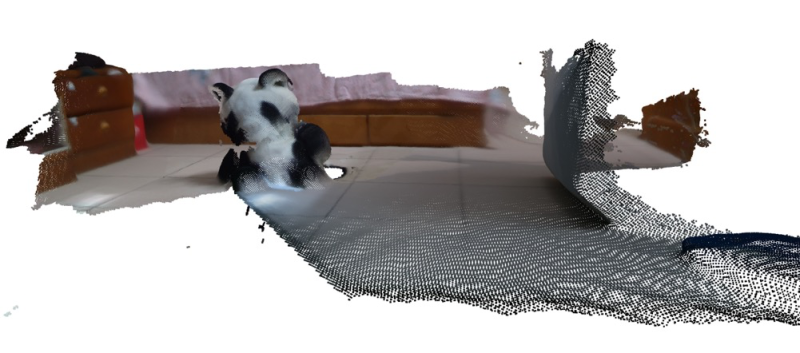
主要分为五个步骤1. 临近点云合并: 将非常接近的帧计算姿态合并在一起,这里假设了临近帧的变化率非常小,会把临近帧合并成 “fragment”

例如:这是一秒十五帧的合并,可以看到临近帧变化小
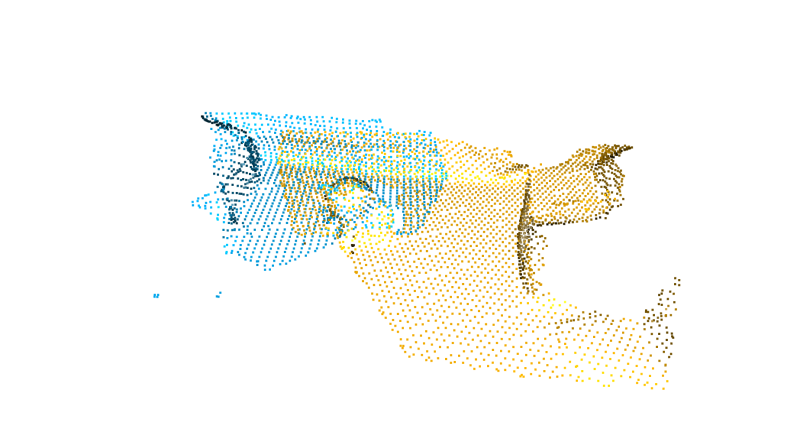
2. 姿态合并:把相邻的 “fagment” 计算相互的姿态变化合并在一起,这个和第一步对比可能是相当于一个非线性的整流,可能可以减少误差

例如:这里不同颜色的区域就是相邻的“fragment”
3. 第三步颜色帧对应精调:用彩色帧校对之前合并,把离群点删除

4. 第四步转化为网格: 计算法向量由点云转化转化为多面体的3dmesh

实验
暂时没有测精度,只是粗略的复现了,官网上论文只看了一小部分,目前主要的贡献是实现过程中做了一些辅助小工具,如下:
#\t可视化点云
PLYvisualizer.py
# 录制视频,用于重建
camera.py
# 录制视频所需的配置
camera_config.json
# 裁剪单帧,方便调试
crop.py
# 分离点和平面,方便截取平面上的物体
pt2pl.py
# 读取录制好的视频 bag格式
readbag.py
# 读取录制好的帧,bag解压出来的frame文件夹下的深度帧和彩色帧
readframe.py
遇到的问题
1. 主要问题就是m1的mac下conda自带的numpy不兼容,一开始以为是矩阵是奇异矩阵无法计算逆,网上找了好久都没有找到原因,最后终于定位到是numpy的问题,猜想最新版numpy可能会已经解决了这个问题,试了一下重装numpy果然就好了。2. 相机的抖动或者横向旋转速度不均匀,对精度影响极大